
Imotus Hovering Autonomous Underwater Vehicle
Overview

Description
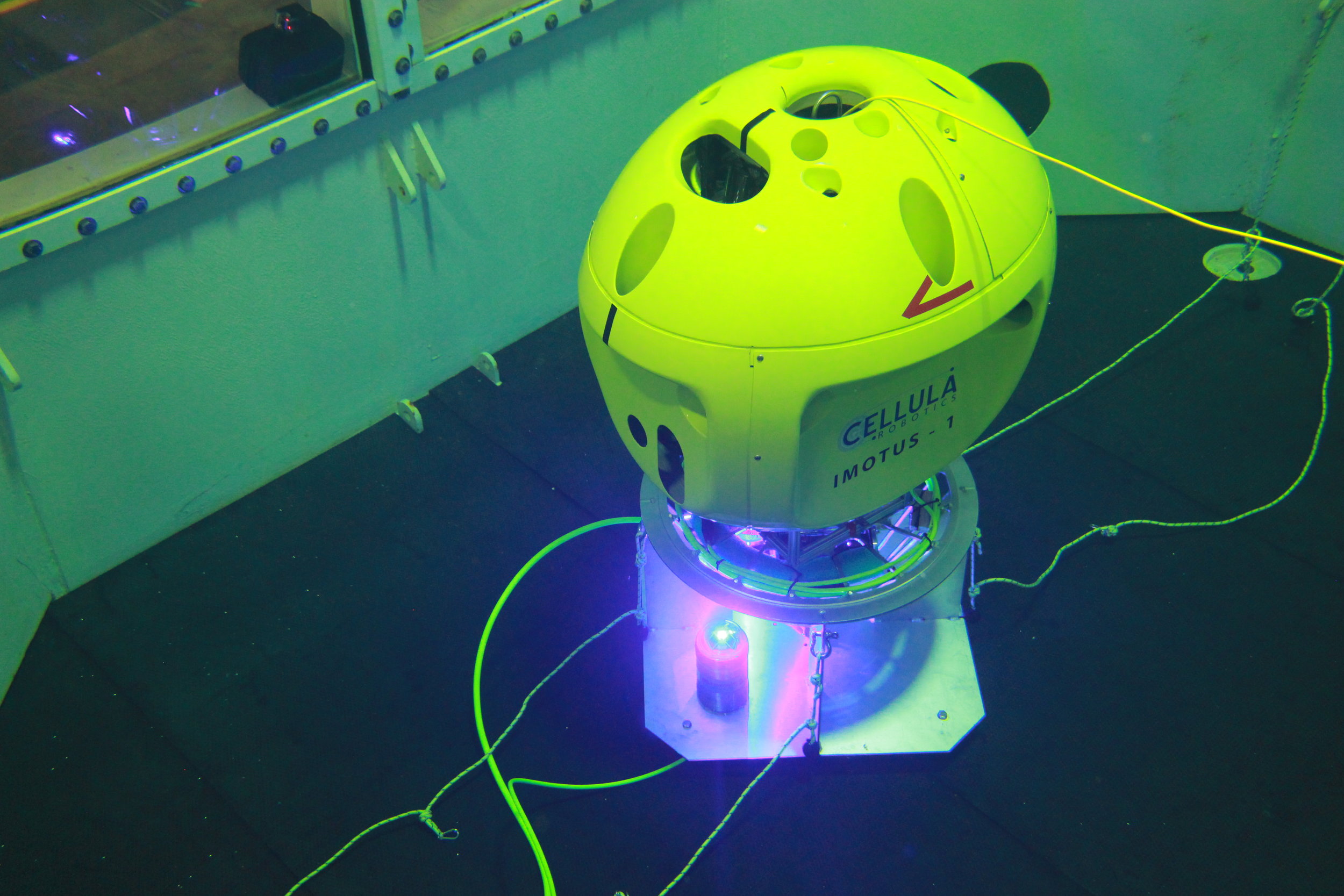
The Imotus Hovering Autonomous Underwater Vehicle (HAUV) is a comprehensive vehicle for performing inspections in complex confined spaces or resident missions in open water.
Imotus is built on a modular core platform, using ROS over Ethernet to communicate between the navigation sensors, main computer and payload modules. Proprietary Simultaneous Localization and Mapping (SLAM) algorithms have been developed to enable navigation, station keeping, route following and autonomous operation in a variety of confined space environments. For open-water environments, dead reckoning is used.
The vehicle can operate with or without a fiber optic umbilical and can dock underwater for recharging, mission data downloads and task updates.
The Following organizations use and Trust the Imotus:


Design Highlights

Snag Resistant Design
Imotus is designed to be snag resistant for use in complex enclosed spaces. If the optional fiber optic umbilical becomes snagged, Imotus can autonomously cut it and follow a safe route to the extraction point for recovery.

subsea charging and data transfer
An optional docking station allows Imotus to be permanently deployed at the work site. Inductive power transfer allows recharging when docked and a blue-light modem provides real-time, high bandwidth communications.

Accurate corrosion Monitoring
An integrated ultrasonic thickness gauge allows Imotus to take detailed measurements of steel pipes and walls for corrosion maps. With Imotus’ inherent position knowledge, the same locations can be measured over time for predictive analytics.
Benefits
SLAM Navigation
No prior knowledge is required to operate in confined spaces. Imotus can map the workspace and navigate within it.
6 DOF
Eight vectored thrusters provide full 6 DOF maneuvering with redundancy.
Real-time Feedback
An optional fiber optic umbilical allows real-time, high bandwidth monitoring of vehicle health and sensors, including inspection cameras.
Low Logistics Platform
Imotus has a fully portable launch & recovery system and monitoring interface system for easy mobilization.
Applications
The Imotus architecture is inherently modular and flexible. Through reconfiguring the HAUV’s arrangement of sensors and actuators, a wide variety of mission objectives can be accomplished using one platform.

CONFINED SPACE INSPECTIONS
Imotus can map and navigate through flooded and confined complex environments, such as offshore oil platform legs, with no prior knowledge of the space required. This provides faster, safer, and more cost-effective inspections compared to using a conventional ROV.

IN-SERVICE TANK INSPECTIONS
Inspections of aboveground storage tank floors typically require draining and cleaning, taking it out of service for a period of time. The Imotus allows for inspections of flooded, confined space tanks to an API-653 standard while they are still in operation, reducing downtime and improving safety.

OPEN WATER & SUBSEA SURVEILLANCE
Using visual, acoustic, and trace chemical sensors, Imotus can perform 24/7 monitoring of subsea infrastructure, such as production equipment, pipeline terminations and jumpers. Anomalies are reported to the remote monitoring station within hours, increasing the security and lifespan of your equipment.

VERTICAL PROFILING
Existing vertical profiling technologies are limited by the lack of lateral freedom; the 8 vectored thrusters on the Imotus enable 6 degrees-of-freedom while profiling in open-water. This allows for sampling in areas that would be difficult to set up regular vertical profilers in, such as hydrothermal vents and undersea volcanic plumes.
Payloads & Modules
4 HD cameras & lights
Ultrasonic Thickness Gauge
Cleaner Brush
Contactless CP
Hydrophone
Magnetometer
Docking Infrastructure
LiDAR & MBES for internal structure mapping and leak detection
Turbidity, Chlorophyll, Dissolved Oxygen
ADCP
Ultrasonic Thickness Phased Array
NDT
Details
Survey and MApping SENSORS
Scanning pencil beam sonar
HD video with 24 megapixel stills camera
Water chemistry (CTD, DO, Hydrocarbon, turbidity)
Ultrasonic thickness gauge
Docking
Underwater docking with 100 Mbit communication and charging available as an option.
Mission Duration
Nominal 12 hours battery life
Depth Rating
150 meters water depth, deeper on request
Gallery





Looking to Purchase or Lease?
We'll customize the Imotus to fit your organization's needs - request a quote below and we'll be in contact. Have more questions before you purchase? Feel free to message us at [email protected] or through our contact form.